Este es un tipo de sensor que convierte la variación de una señal física en una variación de resistencia, Ejemplos de este tipo de transductores son los potenciómetros y galgas extensiométricas (varía la longitud); las resistencias variables con la temperatura (RTD), transductores de efecto Hall y fotorresistencias (varía la conductividad); y los termistores CTN y CTP (variación de la resistencia con la temperatura en los semiconductores).
lunes, 2 de junio de 2008
1.1. Potenciómetros (Variables mecánicas)
Es un resistor que posee un contacto móvil deslizante o giratorio (figura 2.1). Este Constan de una resistencia através de la cual hay una determinada diferencia de potencial. Además hay un contacto unido a la resistencia pero que se puede deslizar a su alrededor; este elemento es conocido como wiper. El wiper se conecta físicamente al elemento cuyo movimiento vamos a medir. Cuando este elemento se mueva el wiper se ira moviendo por la resistencia y la tensión de salida en él ( en el wiper) irá cambiando. La resistencia entre dicho contacto móvil y uno de los terminales fijos viene dada por:
 donde x es la distancia recorrida desde el otro terminal fijo, α la fracción de longitud correspondiente, ρ la resistividad del material, l su longitud y A su sección transversal.
donde x es la distancia recorrida desde el otro terminal fijo, α la fracción de longitud correspondiente, ρ la resistividad del material, l su longitud y A su sección transversal.
La ecuación (2.1) indica que la resistencia medida es proporcional al recorrido del cursor. Esto no siempre es así, pues la resistividad del material no suele ser uniforme a lo largo de todo el recorrido. Tampoco la resolución es infinita, pues muchos potenciómetros funcionan a saltos y no de manera continua; también hay que tener en cuenta la resistencia del contacto. A pesar de todo ello, los potenciómetros permiten medir fácilmente desplazamientos tanto longitudinales como angulares, así como todo tipo de magnitudes físicas asociadas a los mismos.
Simplificaciones:
–Resistencia uniforme a lo largo del recorrido L
–Contacto del cursor perfecto, sin saltos ⇒resolución infinita
–Recorrido mecánico = recorrido eléctrico
–Si se alimenta con tensión alterna, su inductancia y capacidad han de ser despreciables (para R baja la inductancia puede ser significativa, mientras que para R grande la capacidad puede ser significativa)
–La resistencia no varía con la temperatura
–No existe rozamiento ni inercia del cursor
–No existe ruido derivado de la resistencia de contacto
1.2. Galgas extensométricas (Variables mecánicas)
La galga extensiométrica nos permite obtener, mediante el adecuado acondicionamiento de la señal resultante, una lectura directa de la deformación longitudinal producida en un punto de la superficie de un material dado, en el cual se ha adherido la galga.
La unidad de medida de la deformación se expresa mediante ε (épsilon). Esta unidad de medida es adimensional, y expresa la relación existente entre el incremento de longitud experimentado por el objeto y la longitud inicial.
El concepto de deformación engloba todas las variaciones sufridas por un cuerpo cuando éste ha sido sometido a una fuerza externa, bien sea compresión, tracción, torsión o flexión.
La galga extensiométrica es básicamente una resistencia eléctrica. El parámetro variable y sujeto a medida es la resistencia de dicha galga. Esta variación de resistencia depende de la deformación que sufre la galga.
Se parte de la hipótesis inicial de que el sensor experimenta las mismas deformaciones que la superficie sobre la cual está pegada.
El sensor está constituido básicamente por una base muy delgada no conductora, sobre la cual va adherido un hilo metálico muy fino, de forma que la mayor parte de su longitud está distribuida paralelamente a una dirección determinada, tal y como se muestra en la figura siguiente:
{kind=link}
 La resistencia de la galga es la propia resistencia del hilo; si se considera un hilo metálico de longitud L, área A y resistividad ρ, su resistencia R vendrá dada por:
La resistencia de la galga es la propia resistencia del hilo; si se considera un hilo metálico de longitud L, área A y resistividad ρ, su resistencia R vendrá dada por: En base a esta última ecuación, se puede afirmar que la resistencia eléctrica del hilo es directamente proporcional a su longitud, o lo que es lo mismo, su resistencia aumenta cuando éste se alarga.
En base a esta última ecuación, se puede afirmar que la resistencia eléctrica del hilo es directamente proporcional a su longitud, o lo que es lo mismo, su resistencia aumenta cuando éste se alarga.De este modo las deformaciones que se producen en el objeto, en el cual está adherida la galga, provocan una variación de la longitud y, por consiguiente, una variación de la resistencia.
Tipos
*Hilo metálico no bobinado
*Película de metal depositado
*Semiconductor (depositado d difuso)
*Limitaciones
*No puede superar el límite elástico
*Adhesivos especiales
*Errores de temperatura y autocalentamiento
*Aplicaciones
*Fuerza, par, presión
*Deformación
*Aceleración y vibraciones
1.3. Termorresistencias (Variable térmicas)
Es un dispositivo que varía su resistencia con la temperatura. Suele denominarse RTD (Resistive temperature detector) por sus siglas en ingles.
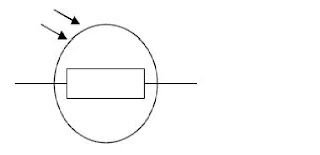
El símbolo que la caracteriza es.

El símbolo sin flecha indica que la variación es intrínseca por la característica resistiva, no por manipulación manualintrínseco y la anotación que la acompañaindica que su variación se debe a la temperatura y que tiene un coeficiente positivo. La ecuación característica de las termorresistencia es la siguiente:

Este dispositivo tiene como limitaciones:
*No puede medir temperaturas próximas a la de la fusión del conductor con que se fabrica.
*El autocalentamiento ocasionará derivas en la medición.
*S se deforma, puede cambiar su patrón de medición.
*Tiene como ventaja el ser diez veces mas sensible que los termopares, tal como se verá mas adelante.
Normalmente no es necesario considerar todos los coeficientes de la ecuación, sino que considerando solo el primer término se tiene una excelente aproximación, es decir,
Donde α es la sensibilidad del material, y R0 es la resistencia a la temperatura de referencia(normalmente 0 grados).
En el caso del platino, tenemos que ofrece una gran linealidad aunque su sensibilidad es menor que la de otros materiales como el níquel. Por esta razón, uno de los sensores de temperatura más comunes, debido a sus prestaciones, es la sonda de platino de 100Ω,conocida como Pt100. entre los dos mas comunes son:
Pt100 (termorresistencia de platino con R0 =100 Ω a 0° C)
Pt1000 (termorresistencia de platino con R0 =1000 Ω a 0° C)
En el caso del platino, tenemos que ofrece una gran linealidad aunque su sensibilidad es menor que la de otros materiales como el níquel. Por esta razón, uno de los sensores de temperatura más comunes, debido a sus prestaciones, es la sonda de platino de 100Ω,conocida como Pt100. entre los dos mas comunes son:
Pt100 (termorresistencia de platino con R0 =100 Ω a 0° C)
Pt1000 (termorresistencia de platino con R0 =1000 Ω a 0° C)
1.4. Termistores (Variables térmicas)
LOS TERMISTORES también son resistencia que varían su magnitud con la temperatura. Se diferencian de las termorresistencia por que están basadas en semiconductores. Por tanto su característica no es lineal, aunque dentro de un margen adecuado pueda ser considerada de esa manera. Si es de coeficiente positivo, PTC, la resistencia se incrementa con la temperatura. Si es de coeficiente negativo, NTC, disminuye con la temperatura.Tiene como ventajas el ser más sensible que las Termorresistencias, mas rápidas y permite hilos de conexión mayores.Tiene como desventaja el ser no lineal, y al variar su temperatura por el autocalentamiento del material.
Su símbolo será:
Su símbolo será:

La raya quebrada indica que no es lineal. El elemento positivo o negativo indica que tiene una característica positiva o negativa respectivamente. Es decir, si es de coeficiente positivo, PTC, la resistencia se incrementa con la temperatura. Si es de coeficiente negativo, NTC, disminuye con la temperatura. En el caso de una NTC la ecuación característica será

donde:
B = temperatura característica del material (2000 K a 5000 K)
R0 = Resistencia a la temperatura de referencia T0, normalmente la temperatura ambiente (25 °C o 298 K)
Tiene como ventajas el ser más sensible que las Termorresistencias, mas rápidas y permite hilos de conexión mayores. Tiene como desventaja el ser no lineal, y al variar su temperatura por el autocalentamiento del material.
Los termistores tiene muchas aplicaciones algunos de los cuales son.
a. Medida de caudal en circuito puente
b. Protección por autocalentamiento
c. Medida directa de temperatura por variación de corriente.
1.5. Magnetorresistencias (Variable magnéticas)
LAS MAGNETORRESISTENCIAS se basan en la variación de resistencia en un conductor por variaciones en el campo magnético.
Este efecto se denomina efecto magnetorresistivo y fue descubierto por Lord Kelvin en 1856
Este tipo de sensores tiene la ventaja con respecto a los sensores inductivos, por ser de orden cero, y con respecto a los sensores de efecto Hall por ser más sensible y proveer un mayor margen de medición de medición.
Está formada por una aleación de Hierro y Níquel (permalloy)
Tiene las siguientes aplicaciones:
* Medición de campos magnéticos en las lectoras de tarjetas.
* Otras magnitudes que provean un cambio en el campo magnético, como el desplazamiento de una pieza, detectores de proximidad, nivel de flotador, etc. En estos casos se utiliza un imán que cambia su posición con el proceso. El campo generado por el imán es medido por la magnetorresistencia.
Este efecto se denomina efecto magnetorresistivo y fue descubierto por Lord Kelvin en 1856
Este tipo de sensores tiene la ventaja con respecto a los sensores inductivos, por ser de orden cero, y con respecto a los sensores de efecto Hall por ser más sensible y proveer un mayor margen de medición de medición.
Está formada por una aleación de Hierro y Níquel (permalloy)
Tiene las siguientes aplicaciones:
* Medición de campos magnéticos en las lectoras de tarjetas.
* Otras magnitudes que provean un cambio en el campo magnético, como el desplazamiento de una pieza, detectores de proximidad, nivel de flotador, etc. En estos casos se utiliza un imán que cambia su posición con el proceso. El campo generado por el imán es medido por la magnetorresistencia.
1.6. Fotorresistencias (Variables ópticas)
LAS FOTORRESISTENCIA o LDR, es un dispositivo que cambia su resistencia por el nivel de incidencia de luz. Esta formada por materiales semiconductores.
Su símbolo es:
Su símbolo es:
La conductividad eléctrica de un material depende del número de portadores en la banda de conducción. En un semiconductor:
–A bajas Temperaturas la mayor parte de los electrones están en la banda de valencia y se comporta casi como un aislante, Al aumentar la Temperatura aumenta la agitación térmica y los electrones comienzan a pasar de la banda de valencia a la de conducción (próximas a diferencia de los aislantes), La energía necesaria para realizar el salto puede venir de otras fuentes como la radiación electromagnética: E = h fsiendo h=6.62 10-34la constante de PlankWs2.
Si la radiación tiene energía suficiente para permitir el salto de la banda prohibida, pero sin exceder el umbral para que se desprendan del material por efecto fotoeléctrico externo, se tendrá efecto fotoeléctrico interno, y a mayor radiación mayor conductividad
Consideraciones:
–Constante de tiempo de subida (expresada en ms) mucho menor que la de caída o extinción (expresada en kΩ/s)
–Son sensibles a la Temperatura por la generación térmica de pares electrón/hueco y por el llamado ruido térmico (fluctuaciones de corriente al aplicar una tensión para medir su valor)–Respuesta espectral estrecha (ver gráfica adjunta)
–Los elementos previstos para longitudes de onda elevada deben mantenerse a baja temperatura para reducir el ruido térmico (células Peltiero criostatos)
Aplicaciones:
–Medidas de luz con poca precisión y bajo coste:
•Control automático del brillo y contraste en receptores de TV
•Control del diafragma en cámaras fotográficas
•Detección de incendios
•Control de iluminación
–Medidas de presencia y posición
1.7. Higrómetros resistivos (Variables químicas)
Un higrómetro resistivo es un elemento cuya resistencia cambia con cambios en la humedad relativa del aire en contacto con el elemento. Los higrómetros resistivos generalmente están formados por dos electrodos de metal laminado sobre una forma plástica. Los electrodos no deben tocarse entre si, y están aislados uno del otro por medio de la forma plástica. Una solución de cloruro de litio es entonces utilizada para recubrir completamente el dispositivo. Esta construcción esta ilustrada en a figura1 (a).
 Figura 1
Figura 1 A medida que la humedad del aire circundante crece, la película de cloruro de litio absorbe más vapor de agua del aire. Esto hace que su resistencia disminuya marcadamente. Dado que la película de cloruro de litio está en contacto estrecho con los dos electrodos de metal, también decrece marcadamente a resistencia entre los terminales de los electrodos. La resistencia entre terminales puede entonces relacionarse a la humedad relativa.
Una curva característica típica de resistencia versus humedad relativa para un higrómetro resistivo se muestra en la figura 1 (b). Los transductores de higrómetro resistivo no pueden utilizarse en todo el rango de humedades relativas, del 0% a 100%. La mayoría de ellos tienen un limite de operación segura del orden del 90% de HR. Una exposición al aire con una humedad relativa mayoral 90% puede resultar en un exceso de absorción de agua por la película de cloruro de litio, una vez que suceda esto, las características de resistencia de higrómetro son alteradas en forma permanente.
1.8. Acondicionamiento: Puente de Wheastone, Amplificador de Instrumentación.
Circuito de acondicionamiento para potenciómetros
 Acondicionamiento para Señales de Galgas Extensiométrica
Acondicionamiento para Señales de Galgas Extensiométrica
 Amplificador de Instrumentacion
Amplificador de Instrumentacion
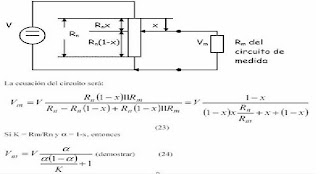
Para el caso de los potenciómetros se suele emplear para su acondicionamiento una interfaz formada por una combinación serie de un resistor y el mismo Sensor (potenciómetro), alimentados por una fuente de fija de tensión o corriente, a este circuito de acondicionamiento se le conoce como divisor de tensión. Puede darse el caso que el Sensor forme conforme la asociación serie de estos dos dispositivos.En la siguiente figura se puede observar la aplicación de esta interfaz al caso de Potenciómetros.
Acondicionamiento para Señales de Galgas ExtensiométricaLas mediciones de galgas extensiométricas involucran sensar cambios muy pequeños de resistencia. Es por esto que una selección apropiada y el uso de un puente, acondicionamiento de señal, cableado y adquisición de datos son componentes requeridos para lograr mediciones precisas.
Completar el Puente
A menos que esté usando un sensor de puente completo con cuatro galgas activas, entonces va a necesitar completar el puente con resistencias de referencia. Es por esta razón que los dispositivos de acondicionamiento para galgas típicamente proveen redes para completar medio puente, las cuales consisten de dos resistencias de referencia de alta precisión. El diagrama de la Figura 1 muestra el cableado de un circuito de una galga extensiométrica de medio puente a un acondicionador con resistencias para completar R1 y R2. El valor nominal de las resistencias es menos importante comparado con qué tan bien las dos resistencias se igualan. Idealmente, los resistors se igualan y proven un voltaje de referencia estable de VEX/2 a la punta de entrada negativa del canal de medición. Por ejemplo, las resistencias de complemento de medio puente incluídas en el módulo de acondicionamiento de señales SCXI-1122 son de 2.5 kW con una tolerancia de 0.02%. La resistencia alta de los resistores de complemento ayudan a minimizar la corriente que tomaría del voltaje de excitación. Exitación del Puente
Exitación del Puente
Acondicionadores de señal para galgas típicamente proveen una fuente de voltaje constante para energizar el puente. Aunque no hay un nivel de voltaje estándar reconocido en la industria, niveles de voltaje de exitación de entre 3 V y 10 V son comunes. Mientras un voltaje de exitación mayor genera proporcionalmente un voltaje de salida mayor, el mayor voltaje puede causar errors debido a sobrecalentamiento. Es importante recalcar que el voltaje de exitación debe ser muy preciso y estable. De modo alternativo, se puede usar un voltaje menos preciso o estable y medir o sensar el voltaje de exitación para calcular la presión correcta.
Medición de Excitación
Si el circuito de la galga de presión esta localizado a una distancia larga del acondicionador de señal y la fuente de exitación puede generarse un error debido a la caída de voltaje causada por la resistencia en los cables que conectan el voltaje de exitación al puente. Para estos casos algunos acondicionadores de señal incluyen una función llamada sensor remoto la cual compensa por este error. Existen dos métodos communes para sensar remotamente. Con el sensor remoto con retroalimentación, usted conecta cables extra con sensores en el punto donde los cables del voltaje de exitación se conectan con el circuito del puente. Los cables con sensores extra sirven para regular la fuente de exitación para compensar por pérdidas en las puntas y así entregar el voltaje necesario al puente. Este esquema se usa en el modulo SCXI-1122.Una manera alterna de sensar remotamente usa un canal separado para medir directamente el voltaje de exitación que se le entrega al puente. Ya que las puntas del canal de medición llevan una corriente muy pequeña, la resistencia en las puntas es despreciable y no afectan a la medición. El voltaje de exitación medido es despues usado en la conversión voltaje-presión para compensar por las pérdidas en las puntas.
Amplificación de Señal
Las salidas de las galgas de presión y los puentes son relativamente pequeñas. En la práctica, la mayoría de los puentes de galgas y transductores de presión tienen salidas de menos de 10 mV/V (10 mV de salida por volt de voltaje de excitación). Con un voltaje de exitación de 10 V , la señal de salida será de 100 mV. Es por esto que los acondicionadores de señal para galgas incuyen amplificadores para aumentar el nivel de la señal, para incrementar la resolución de la medición y mejorar las relaciones de señal a ruido. Los modulos SCXI por ejemplo incluyen amplificadores de ganancia programmable, con ganancias de hasta 2000. Circuito de acondicionamiento para termorresistencias
Circuito de acondicionamiento para termorresistencias
Para adaptar las variaciones de resistencia que se producen en un RTD (termoresistencia) al circuito que va a tratar la información, se suelen utilizar los mismos montajes o circuitos que en los demás transductores que también varían su resistencia con el fenómeno a medir: puente de Wheatstone, amplificadores de instrumentación, acondicionadores integrados, etc.
En dicho circuito, se hace circular una corriente constante por el RTD, por lo que las variaciones de resistencia (debido a los cambios de temperatura) provocarán variaciones proporcionales de la tensión VRTD
Circuito de acondicionamiento del temistor
Son semejantes para los RTD, con la importante salvedad que supone la condición "no lineal" de los termistores. Por ello, se ha de hacer una linealización de su comportamiento. La forma más cómoda y fácil es colocarle una resistencia en paralelo, tal como muestra la figura 1.22. Con esto, el valor del paralelo RT _R para las diferentes temperaturas,sigue una variación bastante lineal, en comparación con como variaba RT sola.
 Puente de Wheastone
Puente de Wheastone
El puente Wheatstone es un circuito muy interesante y se utiliza para medir el valor de componentes pasivos como las resistencias .
En la disposición eléctrica del circuito de abajo vemos que, Rx es la resistencia cuyo valor queremos determinar, R1, R2 y R3 son resistencias de valores conocidos, además la resistencia R2 es ajustable. Si la relación de las dos resistencias del brazo conocido R2/R1) es igual a la relación de las dos del brazo desconocido (Rx/R3), el voltaje entre los dos puntos medios será nulo y por tanto no circulará corriente alguna entre esos dos puntos. Para efectuar la medida lo que se hace es variar la resistencia R2 hasta alcanzar el punto de equilibrio.
Una aplicación muy interesante del puente Wheatstone en la industria es como sensor de temperatura, presión, etc. (dispositivos que varían el valor de sus resistencia de acuerdo a la variación de las variables antes mencionadas).
Es en el amperímetro donde se ve el nivel o grado de desbalance o diferencia que hay entre el valor normal a medir y la medida real.
También se utiliza en los sistemas de distribución de energía eléctrica donde se lo utiliza para detectar roturas o fallas en la líneas de distribución
Amplificador de InstrumentacionEl amplificador de instrumentación es un amplificador diferencial tensión-tensión cuya
ganancia puede establecerse de forma muy precisa y que ha sido optimizado para que
opere de acuerdo a su propia especificación aún en un entorno hostil. Es un elemento
esencial de los sistemas de medida, en los que se ensambla como un bloque funcional que
ofrece características funcionales propias e independientes de los restantes elementos con
los que interacciona. Para ello, se le requiere:
a) Tengan unas características funcionales que sean precisas y estables.
b) Sus características no se modifiquen cuando se ensambla con otros elementos.
ganancia puede establecerse de forma muy precisa y que ha sido optimizado para que
opere de acuerdo a su propia especificación aún en un entorno hostil. Es un elemento
esencial de los sistemas de medida, en los que se ensambla como un bloque funcional que
ofrece características funcionales propias e independientes de los restantes elementos con
los que interacciona. Para ello, se le requiere:
a) Tengan unas características funcionales que sean precisas y estables.
b) Sus características no se modifiquen cuando se ensambla con otros elementos.
En la siguiente figura se muestra la estructura de un amplificador de instrumentación: es muy utilizado para amplificarseñales debiles en hospitales y centros de urgencia, EJ: ELECTROCARDIOGRAMA y en muchas aplicaciones industriales.  Aplicaciones
Aplicaciones
Aplicaciones*Para acondicionar la salida de un puente de wheastone
*Para amplificar señales eléctricas biológicas (por ejemplo en electrocardiogramas).
*Como parte de circuitos para proporcionar alimentación a corriente constante.
*En fuentes de alimentación
*Para amplificar señales eléctricas biológicas (por ejemplo en electrocardiogramas).
*Como parte de circuitos para proporcionar alimentación a corriente constante.
*En fuentes de alimentación
Un amplificador de instrumentación se caracteriza por tener:
*Alta impedancia de entrada.
*Alto rechazo de de señales en modo comun CMRR, superior a 100 dB.
*Ganancia estable y que pueda ser variable con una única resistencia y sin que se contrapongan directamente ganancia y ancho de banda.
*Tensión y corriente de desequilibrio (offset) bajas y con pocas derivas.
*Impedancia de salida baja.
*Existen convencionalmente dos tipos de amplificadores de instrumentación
*Amplificador de instrumentación basado en dos amplificadores y
*Amplificador basado en tres amplificadores.
*El amplificador de instrumentación cuenta con tres amplificadores dos seguidores de tensión para mejorar la impedancia de entrada del amplificador y un amplificador diferencial para rechazar las señales en modo común
*Alta impedancia de entrada.
*Alto rechazo de de señales en modo comun CMRR, superior a 100 dB.
*Ganancia estable y que pueda ser variable con una única resistencia y sin que se contrapongan directamente ganancia y ancho de banda.
*Tensión y corriente de desequilibrio (offset) bajas y con pocas derivas.
*Impedancia de salida baja.
*Existen convencionalmente dos tipos de amplificadores de instrumentación
*Amplificador de instrumentación basado en dos amplificadores y
*Amplificador basado en tres amplificadores.
*El amplificador de instrumentación cuenta con tres amplificadores dos seguidores de tensión para mejorar la impedancia de entrada del amplificador y un amplificador diferencial para rechazar las señales en modo común
2. Sensores de reactancia variable
Los sensores de reactancia variable tienen las siguientes ventajas con respecto a los resistivos:
· Efecto de cara mínimo o nulo.
· Ideales para la medida de desplazamientos lineales y angulares y para la medida de humedad.
· La no-linealidad intrínseca puede superarse usando sensores diferenciales.Como limitación tienen que la máxima frecuencia de variación admisible en la variable medida debe ser menor a la frecuencia de la tensión de alimentación empleada. En este documento se trataran los sensores inductivos.
· Efecto de cara mínimo o nulo.
· Ideales para la medida de desplazamientos lineales y angulares y para la medida de humedad.
· La no-linealidad intrínseca puede superarse usando sensores diferenciales.Como limitación tienen que la máxima frecuencia de variación admisible en la variable medida debe ser menor a la frecuencia de la tensión de alimentación empleada. En este documento se trataran los sensores inductivos.
2.1. Sensores Capacitivos
Un sensor capacitivo es adecuado para el caso de querer detectar un objeto no metálico. Para
objetos metálicos es más adecuado escoger un sensor inductivo.
Para distancias superiores a los 40 mm es totalmente inadecuado el uso de este tipo de sensores, siendo preferiblemente una deteccion con sensores ópticos o de barrera
Los sensores capacitivos funcionan de manera similar a un capacitor simple.
La lámina de metal en el extremo de un sensor esta conectado eléctricamente a un oscilador. El objeto que se detecta funciona como una segunda lámina. Cuando se aplica energía al sensor el oscilador percibe la capacitancia externa entre el objetivo y la lámina interna.
Los sensores capacitivos funcionan de manera opuesta a los inductivos, a medida que el objetivo se acerca al sensor capacitivo las oscilaciones aumentan hasta llegar a un nivel limite lo que activa el circuito disparador que a su vez cambia el estado del switch.
Principio de funcionamiento:
Consta de una sonda situada en la parte posterior de la cara del sensor el cual es una placa condensadora. Al aplicar corriente al sensor, se genera un campo electrostático que reacciona a los cambios de la capacitancia causados por la presencia de un objeto. Cuando el objeto se encuentra fuera del campo electrostático, el oscilador permanece inactivo, pero cuando el objeto se aproxima, se desarrolla un acoplamiento capacitivo entre éste y la sonda capacitiva. Cuando la capacitancia alcanza un límite especificado, el oscilador se activa, lo cual dispara el circuito de encendido y apagado.
objetos metálicos es más adecuado escoger un sensor inductivo.
Para distancias superiores a los 40 mm es totalmente inadecuado el uso de este tipo de sensores, siendo preferiblemente una deteccion con sensores ópticos o de barrera
Los sensores capacitivos funcionan de manera similar a un capacitor simple.
La lámina de metal en el extremo de un sensor esta conectado eléctricamente a un oscilador. El objeto que se detecta funciona como una segunda lámina. Cuando se aplica energía al sensor el oscilador percibe la capacitancia externa entre el objetivo y la lámina interna.
Los sensores capacitivos funcionan de manera opuesta a los inductivos, a medida que el objetivo se acerca al sensor capacitivo las oscilaciones aumentan hasta llegar a un nivel limite lo que activa el circuito disparador que a su vez cambia el estado del switch.
Principio de funcionamiento:
Consta de una sonda situada en la parte posterior de la cara del sensor el cual es una placa condensadora. Al aplicar corriente al sensor, se genera un campo electrostático que reacciona a los cambios de la capacitancia causados por la presencia de un objeto. Cuando el objeto se encuentra fuera del campo electrostático, el oscilador permanece inactivo, pero cuando el objeto se aproxima, se desarrolla un acoplamiento capacitivo entre éste y la sonda capacitiva. Cuando la capacitancia alcanza un límite especificado, el oscilador se activa, lo cual dispara el circuito de encendido y apagado.
2.1.1. Condensador variable
Son condensadores virtuales que crean interferencia o error cuando una de las dos superficies (placa) se coloca a tierra, ya que si otro conductor próximo, por ejemplo la de red de distribución, esta a un determinado potencial con respecto a tierra, la placa que no este conectada a tierra alcanzará también un potencial que según su frecuencia puede interferir en el circuito hasta impedir la medida.
 Efecto de borde:
Efecto de borde:
Es el efecto que se produce en los bordes de un condensador de placas paralelas, el cual consiste en el desvío de las líneas de campo eléctrico, haciendo que estas no se comporten en forma perpendicular a dicha placa. Su comportamiento en esta area de las placas es “arqueada”, es decir, las líneas de campo eléctrico van de una placa a la otra en forma de arco y no en forma lineal. Un método para reducir el efecto de bordes sin alterar las relaciones geométricas, consiste en emplear guardas.
Apantallamiento:
Es la acción de recubrir los cables conductores para evitar las interferencias. Este hecho proporciona un error en el sistema, y es la aparición de condensadores parásitos.
Los problemas que presenta este tipo de medidor es que:
*No se puede despreciar el efecto de los bordes.
*El aislamiento entre placas debe ser alto y constante.
*Existen muchas interferencias capacitivas.
*Los cables de conexión generan condensadores parásitos.
Algunas aplicaciones de los sensores son.
a. Medida de desplazamientos lineales y angulares
.b. Detector de proximidad.
c. Cualquier otra magnitud que se pueda convertir en desplazamiento.
d. Medidas de nivel de líquido conductor y no conductor.
2.1.2. Condensador diferencial
Condensador diferencial se denomina al formado por tres placas planas paralelas. En general, las placas exteriores suelen ser fijas y la placa central móvil, en respuesta a la variable a detectar. Vemos cómo, a pesar de que C1 y C2 son no lineales, se logra obtener una salida lineal realizando una medida diferencial y con una sensibilidad mayor que en el caso del condensador simple.
Aplicaciones típicas de esta configuración son los micrómetros, acelerómetros e inclinómetros.
Si se disponen las tres placas del condensador diferencial cómo se muestra en la figura derecha y se varía el área entre placas, se tiene que la medida diferencial de la capacidad nos permite obtener una salida lineal con el desplazamiento. Con esta técnica se han llegado a medir desplazamientos de hasta 10-10 mm.
Aunque se ha mejorado en linealidad, el condensador diferencial no esta exento de problemas: dispersión del campo eléctrico en los bordes de los electrodos, aislamiento entre placas, capacidades parásitas, cables de conexión, etc. La dispersión del campo en los bordes de los electrodos puede apreciarse mejor en la figura a. Para evitar este efecto, en la figura b se ha colocado un electrodo de guarda rodeando al electrodo 3. Este electrodo de guarda se mueve junto al electrodo 3 y está puesto a su mismo potencial. Ahora, las líneas de campo aparecen distorsionadas en el borde de la guarda, lo cual no importa ya que no es un electrodo de medida. En cambio el campo si es uniforme en los electrodos de medida. El electrodo de guarda protege simultáneamente al electrodo 3 de campos externos que puedan afectar a la linealidad de la medida.

Aplicaciones de los sensores capacitivos diferenciales:
Estos sensores se utilizan especialmente para medir desplazamientos lineales y angulares.
Este tiene la ventaja de proporcionar mediciones de desplazamiento muy exactas. El circuito necesario para montarlo es similar al puente de wheatstone solo que en lugar de resistencias se usan condensadores. Se debe usar también una capacitancia variable para balancear el circuito.
Este tipo de transductor es útil para medir presión sanguínea, registrar los movimientos de las paredes del pecho, presión plantar, sonidos del corazón y los pulsos radial y braquial. Para lograrlo una de las placas de condensador se mantiene fija, mientras la segunda está unida a un miembro elástico.Una interesante aplicación de los sensores capacitivos la constituyen los capacitares biológicos. Estos utilizan las propiedades dieléctricas del tejido vivo como una parte del capacitor. Cremen (1907) insertó un corazón latiente de rana entre las dos placas de un condensador y registró el cambio de capacitancia cuando el corazón se llenaba y vaciaba de sangre. Un sistema similar fue desarrollado por Joseph (1944) quien colocó el tórax de sujetos humanos, en registro simultáneo con el ECG mostró que los cambios capacitivos estaban asociados con la actividad cardiaca. Para estudiar el flujo sanguíneo Atzler y Lehman (1932) usaron sujetos humanos colocando un electrodo encima del pecho y el segundo en contacto con la espalda. Fening (1936) desarrolló lo que el llamó oscilocapacitógrafo, utilizando una rata que yacía sobre una placa del capacitor, y la otra placa la colocaba 5mm por encima del tórax del animal. Los movimientos respiratorios cambiaban la capacitancia a través de una variación del área, la separación de las placas y la distribución del dieléctrico, cambios que alteraban la corriente del ánodo del tubo oscilador. Así se obtenía un buen registro de la respiración de las ratas. Para una descripción de estos y otros experimentos refiérase al libro de Wilches o Webster.
En general se puede establecer que los sensores capacitivos tienen un pequeño tamaño, construcción robusta y un pequeño desplazamiento volumétrico. La señal de salida es débil por lo que precisan de amplificadores con el riesgo de introducir errores en la medición. Además son sensibles a variaciones de temperatura.
Ventajas
Simplicidad mecánica
Error de rozamiento mínimo
Tamaño y masa pequeños
Alta resolución y sensibilidad
Buena reproductibilidad
Alta estabilidad con la temperatura
Fácil integración en C.I.
Desventajas
Resistencias parásitas
Alta impedancia de salida
Afectados por campos electromagnéticos
Necesidad de apantallamiento
Utilización de guardas
Aplicaciones de estos sensores:
+Desplazamientos lineales y angulares.
+Detector de proximidad.
+Cualquier magnitud que implique un desplazamiento (presión, fuerza, etc)
+Medida de humedad por variación de e.+Medida de Tª (de e=k/(T-Tc)).
+Medida de espesores de materiales dieléctricos.
+Medida de nivel de líquidos.
+Presión, fuerza, par y aceleración
+Deformaciones, galgas capacitivas
+Humedad (óxido de aluminio como dieléctrico)
+Análisis químico
+Nivel de líquidos
2.1.3. Acondicionamiento: divisor de tensión, amplificador de carga, amplificador de transconductancia
Circuitos de acondicionamiento para sensores capacitivos
Los sensores capacitivos presentan una situación particular que deben ser alimentados con una señal alterna de excitación. Como se prefiere una capacidad sensora menor a 100 pF, la frecuencia oscilará entre 10 kHz y 100 MHz. Los circuitos de acondicionamiento dependerán de si el sensor es simple o diferencial. Para el caso de condensador simple se tiene.
Divisor de tension
Los divisores de Tensión se usan frecuentemente en el diseño de circuitos porque son útiles para generar un voltaje de referencia, para la polarización de los circuitos activos, y actuando como elementos de realimentación.
La caída de tensión en cada una de las resistencias, es proporcional a su valor. Es decir, si las dos resistencias conectadas en serie tuvieran el mismo valor (por ejemplo, ambas son de 200 Ohms), en cada una de ellas caería la mitad de la tensión. (Si la fuente fuera de 12 Volts, entre los terminales de cada resistencia se medirían 6 Volts).
Amplificador de Carga
Un amplificador de carga es un tipo especial de preamplificador que se usa en acelerómetros piezoeléctricos sin circuitos integrados.Su propósito es de convertir la impedancia de salida extremadamente alta del acelerómetro a un valor bajo,adaptado para transmitir la señal de vibración a través de cables a otros instrumentos que la van a procesar.El amplificador de carga es sensible a la cantidad de carga eléctrica generada por el acelerómetro en lugar de al voltaje que genéra el mismo.Ya que la carga es independiente del cable conectado al acelerómetro,la sensibilidad del acelerómetro no varía con la longitud del cable como lo hace cuando se usa un amplificador de voltaje.
Amplificador de transconductancia
Un amplificador de transconductancia variable (OTA) es un dispositivo electrónico parecido a un amplificador operacional. Si bien en un amplificador operacional, la tensión de salida es proporcional a la tensión de entrada, en un amplificador operacional de transconductancia, es la corriente de salida la que es proporcional a la tensión de entrada:
Esto se consigue con una alta impedancia de salida, a diferencia del amplificador operacional (OA) que presenta una baja impedancia a la salida. Esto implica que el OTA trabajará con bajas corrientes de salida.
Estos circuitos integrados (C.I.) disponen de una entrada de corriente (Amplifier bias input) que controla la ganancia de corriente.
Colocando una resistencia a la salida, se puede hacer la conversión de corriente a tensión, transformando el dispositivo en un amplificador controlado por tensión a través de la referida entrada (amplifier bias input).
La aplicación práctica más común de estos dispositivos es la de amplificador de ganancia variable controlada por tensión (como control de volumen en equipos de audio). Actualmente, para estas aplicaciones existen C.I. de controles de volumen específicos, controlados por una tensión DC o por una señal digital para adecuar un interfaz de un pulsador o de la señal de un mando a distancia.
La posibilidad de programar la transconductancia permite dos tipos de aplicaciones. En el primer grupo están comprendidas aquellas aplicaciones en las cuales se debeoptimizar alguna especificación (ruido, corrientes de polarización, resistencias de entrada y salida, etc.). En el segundo grupo se incluyen dispositivos de tipo paramétrico o controlado, como amplificadores de ganancia controlada por tensión, filtros controlados, osciladores controlados, resistencias controladas, etc
Los sensores capacitivos presentan una situación particular que deben ser alimentados con una señal alterna de excitación. Como se prefiere una capacidad sensora menor a 100 pF, la frecuencia oscilará entre 10 kHz y 100 MHz. Los circuitos de acondicionamiento dependerán de si el sensor es simple o diferencial. Para el caso de condensador simple se tiene.

Divisor de tension
Los divisores de Tensión se usan frecuentemente en el diseño de circuitos porque son útiles para generar un voltaje de referencia, para la polarización de los circuitos activos, y actuando como elementos de realimentación.
La caída de tensión en cada una de las resistencias, es proporcional a su valor. Es decir, si las dos resistencias conectadas en serie tuvieran el mismo valor (por ejemplo, ambas son de 200 Ohms), en cada una de ellas caería la mitad de la tensión. (Si la fuente fuera de 12 Volts, entre los terminales de cada resistencia se medirían 6 Volts).
Amplificador de Carga
Un amplificador de carga es un tipo especial de preamplificador que se usa en acelerómetros piezoeléctricos sin circuitos integrados.Su propósito es de convertir la impedancia de salida extremadamente alta del acelerómetro a un valor bajo,adaptado para transmitir la señal de vibración a través de cables a otros instrumentos que la van a procesar.El amplificador de carga es sensible a la cantidad de carga eléctrica generada por el acelerómetro en lugar de al voltaje que genéra el mismo.Ya que la carga es independiente del cable conectado al acelerómetro,la sensibilidad del acelerómetro no varía con la longitud del cable como lo hace cuando se usa un amplificador de voltaje.
Amplificador de transconductancia
Un amplificador de transconductancia variable (OTA) es un dispositivo electrónico parecido a un amplificador operacional. Si bien en un amplificador operacional, la tensión de salida es proporcional a la tensión de entrada, en un amplificador operacional de transconductancia, es la corriente de salida la que es proporcional a la tensión de entrada:
Esto se consigue con una alta impedancia de salida, a diferencia del amplificador operacional (OA) que presenta una baja impedancia a la salida. Esto implica que el OTA trabajará con bajas corrientes de salida.
Estos circuitos integrados (C.I.) disponen de una entrada de corriente (Amplifier bias input) que controla la ganancia de corriente.
Colocando una resistencia a la salida, se puede hacer la conversión de corriente a tensión, transformando el dispositivo en un amplificador controlado por tensión a través de la referida entrada (amplifier bias input).
La aplicación práctica más común de estos dispositivos es la de amplificador de ganancia variable controlada por tensión (como control de volumen en equipos de audio). Actualmente, para estas aplicaciones existen C.I. de controles de volumen específicos, controlados por una tensión DC o por una señal digital para adecuar un interfaz de un pulsador o de la señal de un mando a distancia.
La posibilidad de programar la transconductancia permite dos tipos de aplicaciones. En el primer grupo están comprendidas aquellas aplicaciones en las cuales se debeoptimizar alguna especificación (ruido, corrientes de polarización, resistencias de entrada y salida, etc.). En el segundo grupo se incluyen dispositivos de tipo paramétrico o controlado, como amplificadores de ganancia controlada por tensión, filtros controlados, osciladores controlados, resistencias controladas, etc
2.2. Sensores inductivos
Los sensores inductivos son aquellos que producen una modificación de la inductancia o inductancia mutua por variaciones en un campo magnético. Estas variaciones pueden ser fruto de perturbaciones en el campo, o modificación de la distancia de influencia del campo.
Principio de funcionamiento
El campo magnético se determina a través de sus efectos sobre los elementos que se encuentran en su área de afectación. Los efectos se pueden agrupar en dos:
· Fuerza magnética: efecto notorio especialmente en elementos ferromagnéticos, pero también en sus efectos sobre cargas eléctricas en movimiento (ejemplo fuerza de Lorenz).
· Efectos de inducción: efecto resultante de la variación en función del tiempo del campo magnético en elementos conductores eléctricos (ejemplo: motores, transformadores).
Principio de funcionamiento
El campo magnético se determina a través de sus efectos sobre los elementos que se encuentran en su área de afectación. Los efectos se pueden agrupar en dos:
· Fuerza magnética: efecto notorio especialmente en elementos ferromagnéticos, pero también en sus efectos sobre cargas eléctricas en movimiento (ejemplo fuerza de Lorenz).
· Efectos de inducción: efecto resultante de la variación en función del tiempo del campo magnético en elementos conductores eléctricos (ejemplo: motores, transformadores).
2.2.1. Reluctancia variable
Los sensores inductivos basan su funcionamiento en el cambio de la reluctancia total de un circuito magnético cuando se modifican las distancias de los entrehierros. Si tenemos un circuito de N espiras que concatena un flujo y por el que circula una corriente i, la inductancia L se puede expresar como: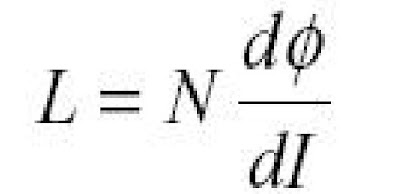
Para una bobina de longitud L y sección de área A, donde la longitud sea mucho mayor que el diámetro de las espiras se tiene:
donde φ es el flujo de campo magnético, I es la corriente y N es el número de vueltas del inductor.
Pero el flujo magnético es igual al cociente entre la fuerza magnetomotriz M y la reluctancia magnética R, y además, M = NI, por lo que
Pero el flujo magnético es igual al cociente entre la fuerza magnetomotriz M y la reluctancia magnética R, y además, M = NI, por lo que
Para una bobina de longitud L y sección de área A, donde la longitud sea mucho mayor que el diámetro de las espiras se tiene:
donde;
μr es la permeabilidad relativa del núcleo
L = recorrido de las líneas de campo en el aire.
A = Area delas bobinas.
Normalmente se aprovechan las variaciones de la longitud y de la permeabilidad. Cuando lo que varía es la distancia L se está hablando de sensores de entrehierro variable, y cuando lo que varia es la permeabilidad se dice que se está hablando de sensores de núcleo móvil.
Esto sensores tiene los siguientes problemas:
a. Los campos magnéticos parásitos afectan a L, por lo que se deben apantallar.
b. La relación L y R no es constante y varía hacia los extremos.
c. L y R son inversamente proporcionales, por lo que las medidas serán normalmente no lineales.
d. La temperatura de trabajo debe ser menor a la de Curie del material usado.
Por contra tienen la siguientes ventajas:
a. La humedad los afecta muy poco.
b. Tiene poca carga mecánica.
c. Y una alta sensibilidad
2.2.2. Inductancia mutua (LVDT)
Este tipo de sensores se basa en la variación de la inductancia mutua entre un primario y cada uno de los dos secundarios al desplazar el núcleo. La denominación LVDT viene de Linear Variable Differential Transformer.
Aunque este dispositivo cambia la impedancia mutua, la salida es una tensión alterna modulada, no un cambio de impedancia. Tiene como limitaciones que en el centro la inductancia mutua no se anula, por deficiencias en el proceso de construcción. Además existe la presencia de armónicos en la salida.
Sin embargo tiene las siguientes ventajas:
a. Resolución infinita.
b. Poca carga mecánica.
c. Bajo rozamiento: vida ilimitado y alta fiabilidad.
d.Ofrecen aislamiento eléctrico entre el primario y el secundario.
e. Aísla el sensor (vástago) del circuito eléctrico
f. Alta repetibilidad.
g. Alta linealidad.h. Tiene alcances desde 100 micrometro hasta 25 centímetros.
Aunque este dispositivo cambia la impedancia mutua, la salida es una tensión alterna modulada, no un cambio de impedancia. Tiene como limitaciones que en el centro la inductancia mutua no se anula, por deficiencias en el proceso de construcción. Además existe la presencia de armónicos en la salida.
Sin embargo tiene las siguientes ventajas:
a. Resolución infinita.
b. Poca carga mecánica.
c. Bajo rozamiento: vida ilimitado y alta fiabilidad.
d.Ofrecen aislamiento eléctrico entre el primario y el secundario.
e. Aísla el sensor (vástago) del circuito eléctrico
f. Alta repetibilidad.
g. Alta linealidad.h. Tiene alcances desde 100 micrometro hasta 25 centímetros.
3. Sensores electromagnéticos
Los sensores electromagnéticos son aquellos en los que una magnitud física puede producir una alteración de un campo magnético o de un campo eléctrico, sin que se trate de un cambio de inductancia o de capacidad. Se tienen dos tipos: sensores basados en la ley de Faraday y los Sensores basados en el efecto Hall.
3.1. Basados en la ley de Faraday
Estos sensores se utilizan en tacogeneradores o tacómetros de AC (generadores de energía eléctrica) para medir la velocidad angular w. La ley de Faraday dice: “En un circuito magnético o bobina con N espiras con un flujo magnético φ=f(t) se induce una tensión:” por lo que este sensor se basa en el principio de que una variación en el flujo magnético sobre una bobina, genera una fuerza electromotriz.
Las condiciones que deben cumplirse para poder usar este tipo de medidor son:
*Perfil de velocidades simétrico.
*Tubería no metálica ni magnética: teflón o cerámica.
*Electrodo de acero o titanio
*Tubería llena
*Campo magnético continuo o alterno.
*Debe ser ideal para aguas residuales, líquidos corrosivos o con sólidos en suspensión.
Las condiciones que deben cumplirse para poder usar este tipo de medidor son:
*Perfil de velocidades simétrico.
*Tubería no metálica ni magnética: teflón o cerámica.
*Electrodo de acero o titanio
*Tubería llena
*Campo magnético continuo o alterno.
*Debe ser ideal para aguas residuales, líquidos corrosivos o con sólidos en suspensión.
3.2. Basados en el efecto Hall
Son empleados en la medida de campos magnéticos (gaussímetros), medida de corriente (amperímetros) y medida de potencias (vatímetros). El voltaje Hall es la diferencia de potencial que se crea en las superficies de una barra conductora, cuando por ésta fluye una corriente y está sometida a un campo magnético. En la siguiente gráfica se muestra un ejemplo de medición de corriente en donde, Iin crea B, a su vez B crea VH que es proporcional a Iin (Ibias = constante).
Tiene como limitación.
+La temperatura cambia la resistencia del material.
+Hay un error de cero debido a inexactitudes físicas,
Tiene como ventajas:
+Salida independiente de la velocidad de variación del campo magnético.
+Inmune a las condiciones ambientales.
+Sin contacto.Se puede aplicar a la medida de campos magnéticos, medida de desplazamientos
Tiene como limitación.
+La temperatura cambia la resistencia del material.
+Hay un error de cero debido a inexactitudes físicas,
Tiene como ventajas:
+Salida independiente de la velocidad de variación del campo magnético.
+Inmune a las condiciones ambientales.
+Sin contacto.Se puede aplicar a la medida de campos magnéticos, medida de desplazamientos

Suscribirse a:
Entradas (Atom)